
I am a doctoral student in the School of Computer Science at Carnegie Mellon University (CMU). My research focuses on advancing time series forecasting for real-world applications. More information on specific research areas and publications is included below.
I have worked on several projects aimed at improving outcome prediction through forecasting and survival analysis frameworks, while also contributing open-source code. In addition, I have collaborated with industry partners in healthcare and renewable wind energy to advance models for critical event prediction.
Research
Multivariate Forecasting
Leveraging relationships across multiple time series, whether through cross-channel dependencies or exogenous covariates, has been shown to improve forecasting performance across diverse domains including weather, energy,supply chain, healthcare, and finance. Additionally, leveraging domain knowledge in the form of priors can be used to imbue models with structural constraints, ensuring that the forecasts remain interpretable and aligned with real-world dynamics.
Time Series Forecasting Foundation Models
Large pre-trained time series foundation models (TSFMs) have demonstrated impressive zero-shot performance across diverse domains. Current research is focused on identifying architectures that best support generalization while improving scalability and efficiency in training on vast datasets. Another important direction involves uncovering how these models internalize temporal patterns and represent domain-specific concepts.
Zero-shot Forecasting Generalization
Foundation models are trained on large, diverse datasets, raising a critical question for time series forecasting: do models generalize well because they learn underlying concepts of temporal dynamics, or do they simply memorize specific patterns seen during training? If those models rely on memorization, particularly in the form of time series pattern matching, it could lead to redundancy in the stored knowledge, parameter inefficiency, and possibly limit their ability to generalize well to out-of-distribution (OOD) data. A central challenge is to understand how forecasting models generalize, especially under OOD conditions, in order to design models with stronger generalization capabilities.
Publications and Presentations
A complete list of publications can be found here.
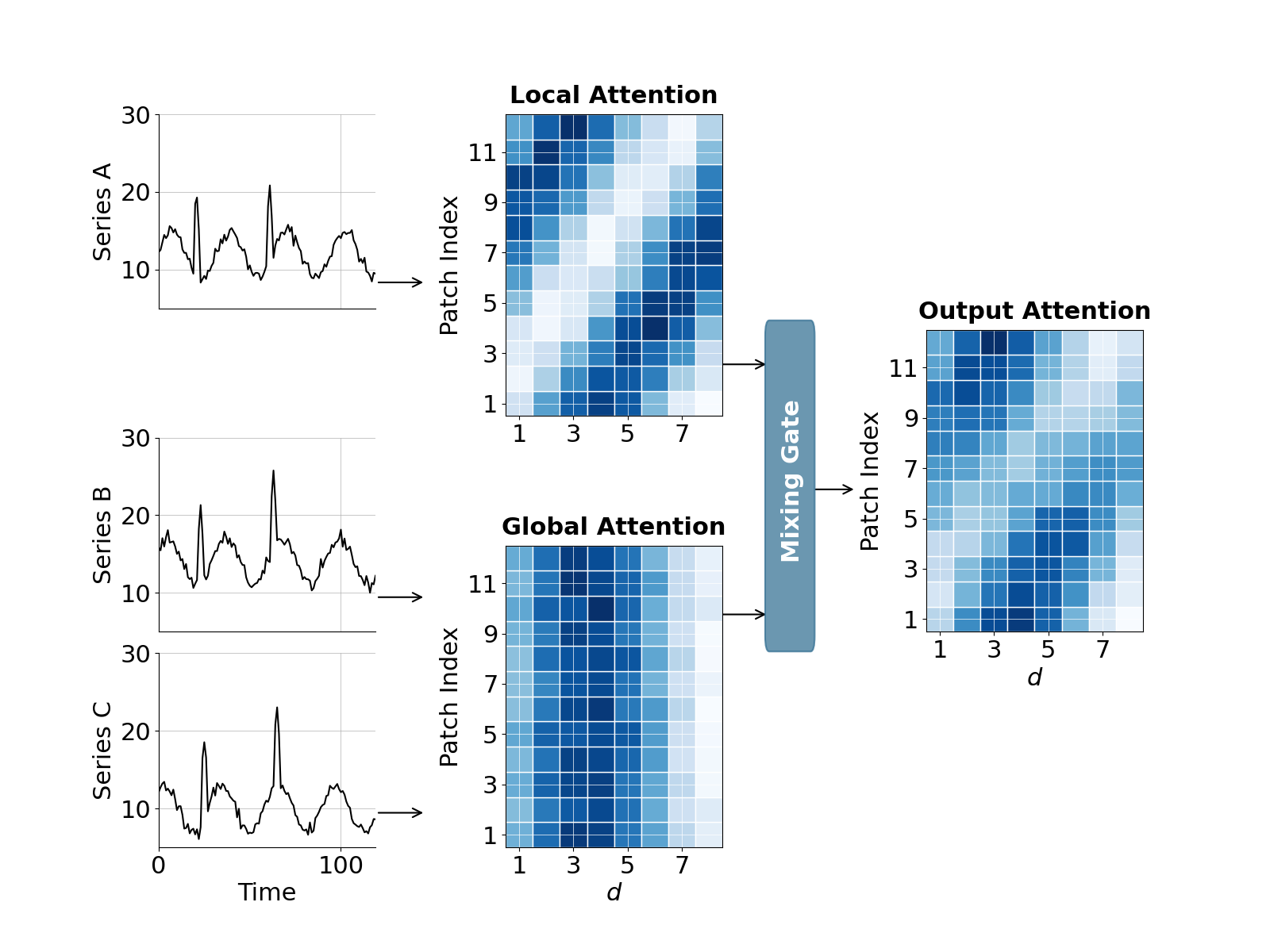
MICA: Multivariate Infini Compressive Attention for Time Series Forecasting
W. Potosnak, N. Żukowska, M. Wiliński, D. Howarth, I. Stępka, M. Goswami, A. Dubrawski
We propose Multivariate Infini Compressive Attention (MICA), an architectural design to extend channel-independent Transformers to channel-dependent forecasting. By adapting efficient attention techniques from the sequence dimension to the channel dimension, MICA adds a cross-channel attention mechanism to channel-independent backbones that scales linearly with channel count and context length.
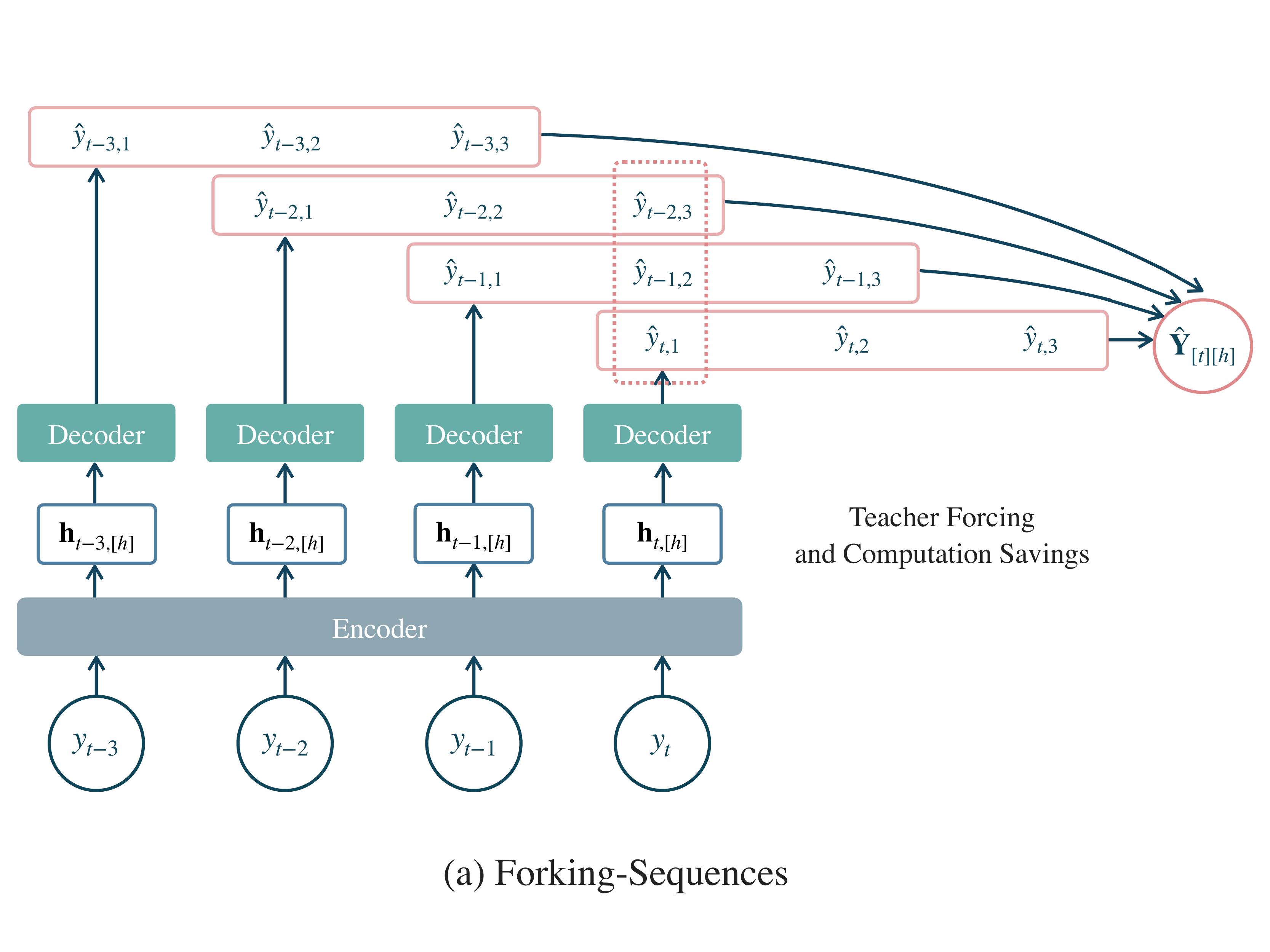
Forking-Sequences
W. Potosnak, M. Wolff, B. Oreshkin, M. Cao, M. W. Mahoney, D. Efimov, K. G. Olivares
Unlike standard statistical and neural forecasting methods that treat each FCD independently, the forking-sequences method jointly encodes and decodes the entire time series across all FCDs. We formalize the forking-sequences approach and advocate for its broader adoption, demonstrating three key benefits: (i) more stable and consistent gradient updates during training; (ii) reduced forecast variance through ensembling; and (iii) improved computational efficiency during inference.
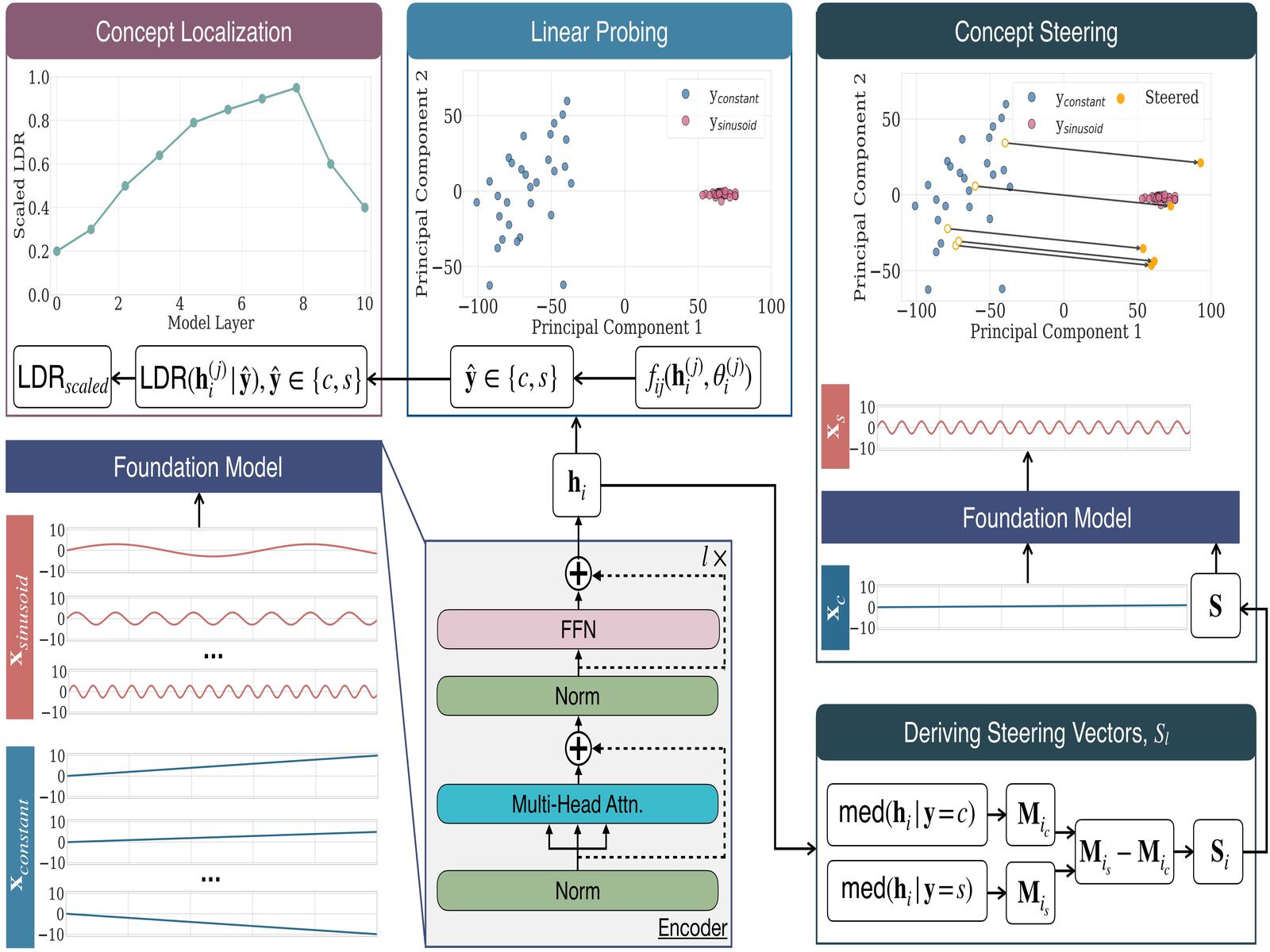
Exploring Representations and Interventions in Time Series Foundation Models
M. Wiliński, M. Goswami, W. Potosnak*, N. Żukowska*, A. Dubrawski
Time series foundation models promise to be powerful tools for a wide range of applications. However, their internal representations and learned concepts are still not well understood. We explore the concepts learned by these models—such as periodicity and trends—and demonstrate how to steer these learned concepts by adjusting representations across layers, enabling the model to generate concept-informed predictions. In proceedings of the 42nd International Conference on Machine Learning (ICML).
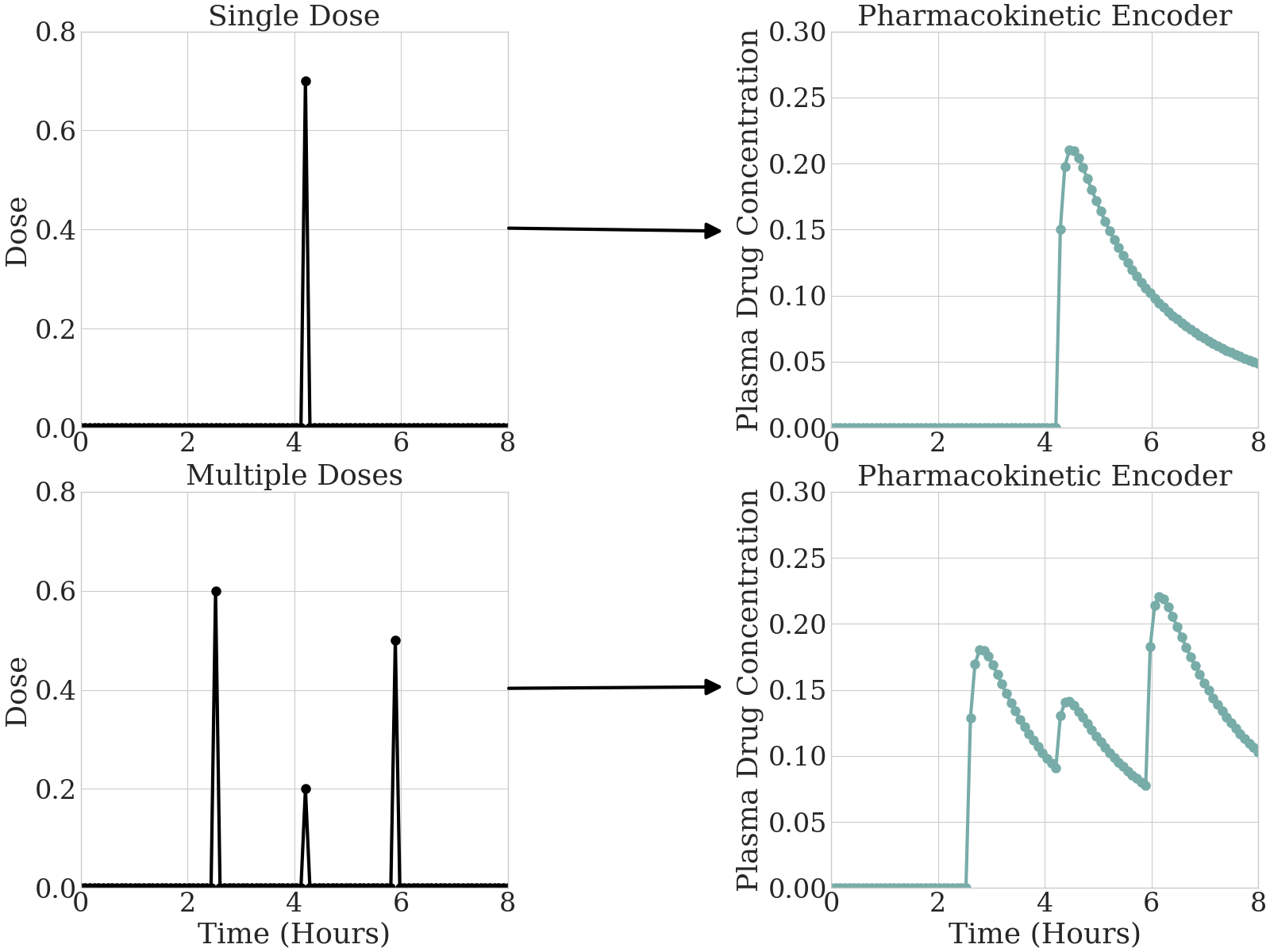
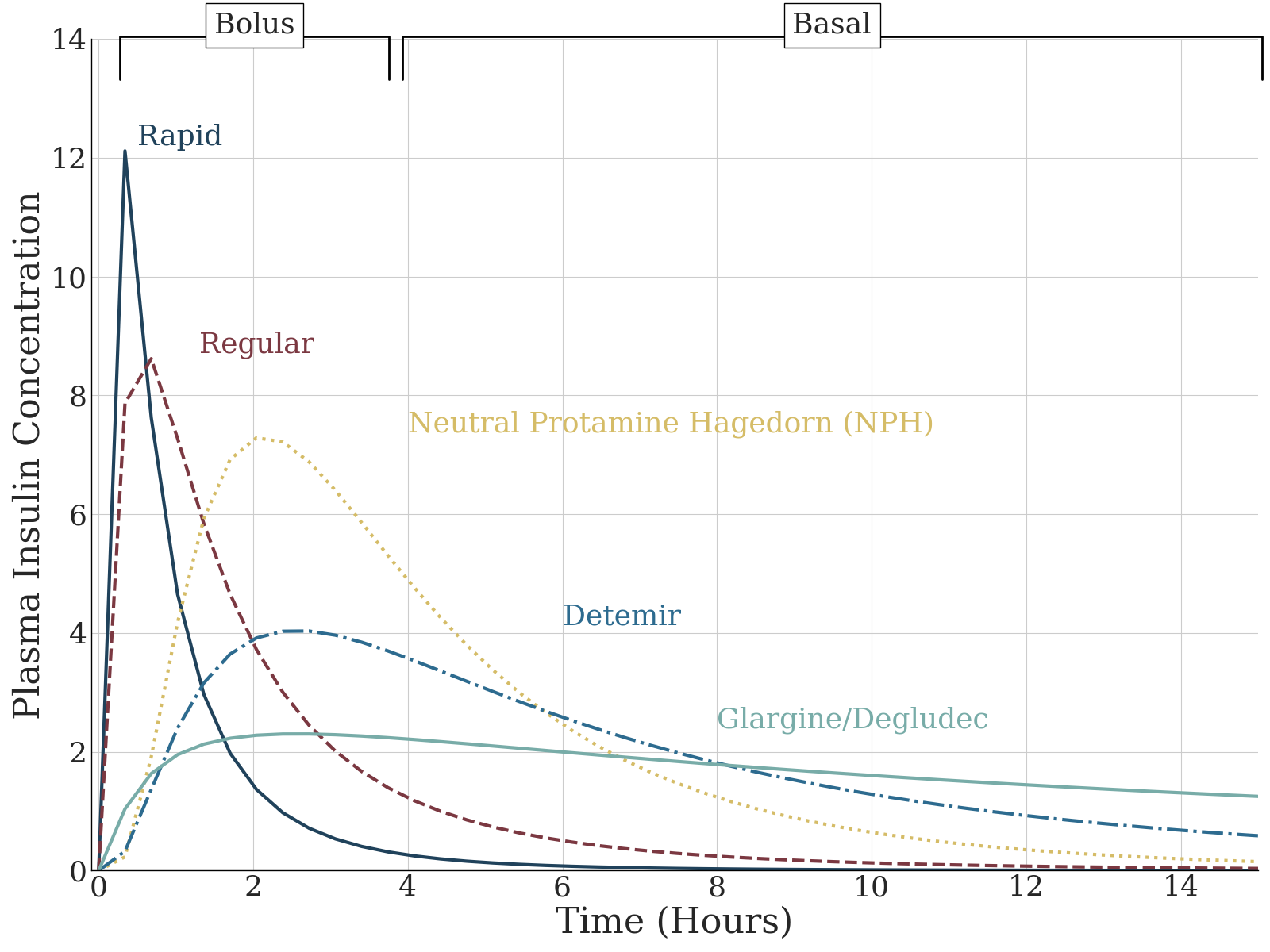
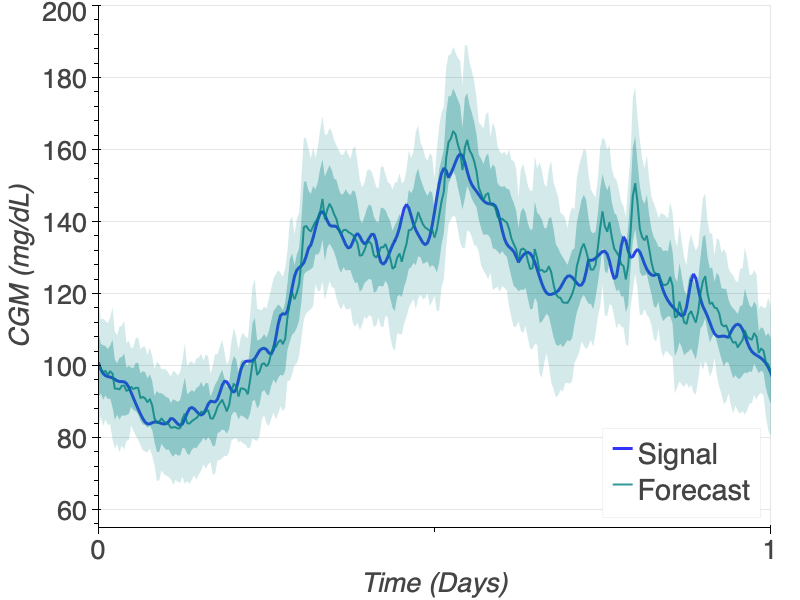
Global Deep Forecasting with Patient-Specific Pharmacokinetics
W. Potosnak, C. Challu, K. G. Olivares, K. A. Dufendach, A. Dubrawski
We propose a novel hybrid global-local architecture and a model-agnostic encoder that informs deep learning models of patient-specific treatment effects, achieving significant accuracy improvements on large-scale simulated and real-world blood glucose datasets. Our PK encoder surpasses baselines by up to 16.4% on simulated data and 4.9% on real-world data for individual patients during critical events of severely high and low glucose levels. Additionally, our proposed hybrid global-local architecture outperforms patient-specific PK models by 15.8%, on average. In proceedings of the Conference on Health, Inference, and Learning (CHIL) 2025.
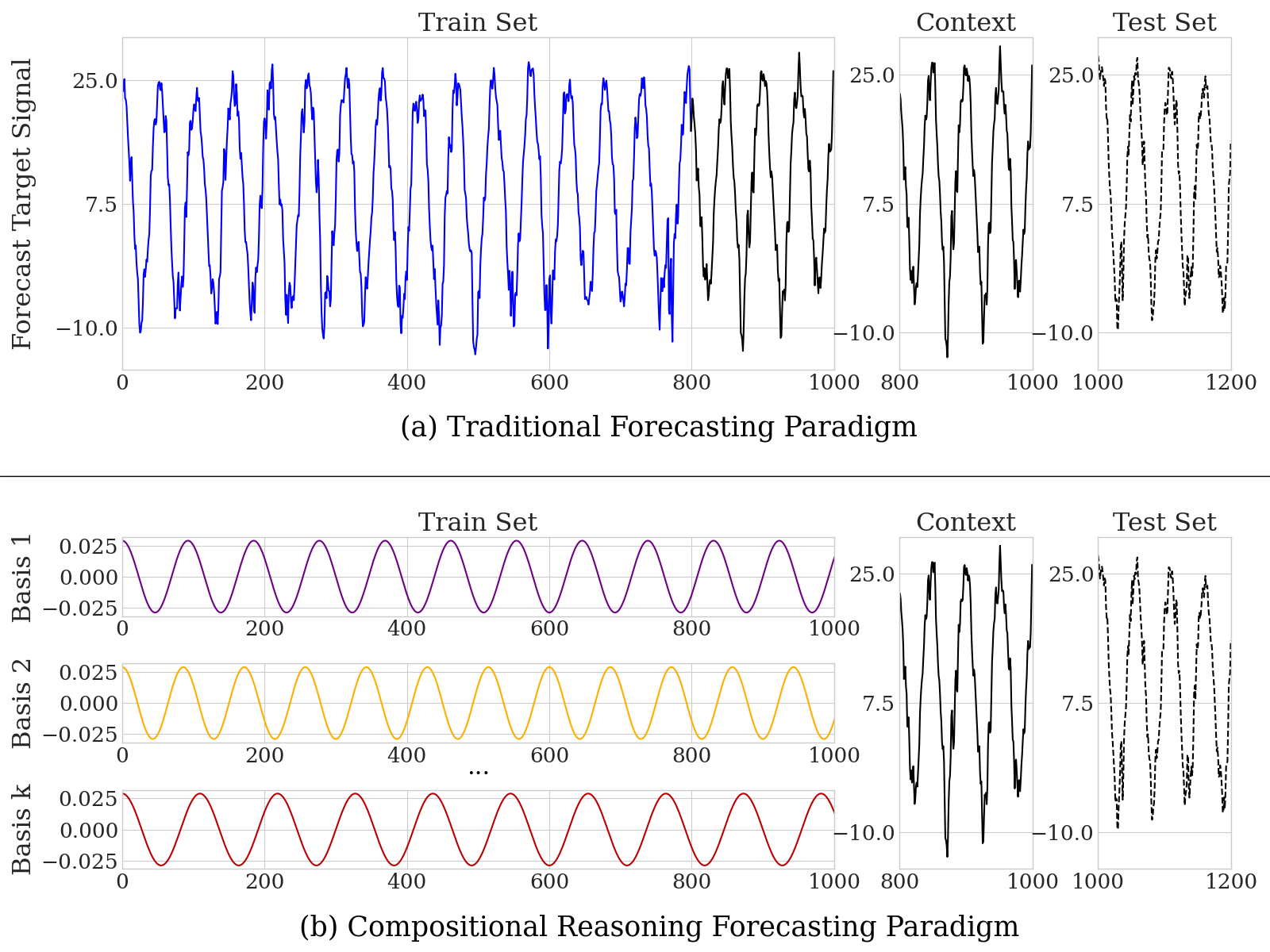
Investigating Compositional Reasoning in Time Series Foundation Models
W. Potosnak, C. Challu*, M. Goswami*, K. G. Olivares, M. Wiliński, N. Żukowska, A. Dubrawski
This work investigates whether Time Series Foundation Models (TSFMs) rely on memorization or possess compositional reasoning capabilities. Inspired by language modeling research, the study formally defines compositional reasoning in forecasting and evaluates 23 deep learning models on synthetic and real-world datasets. Through controlled experiments, the findings reveal how architectural design choices influence TSFMs' reasoning and generalization abilities.
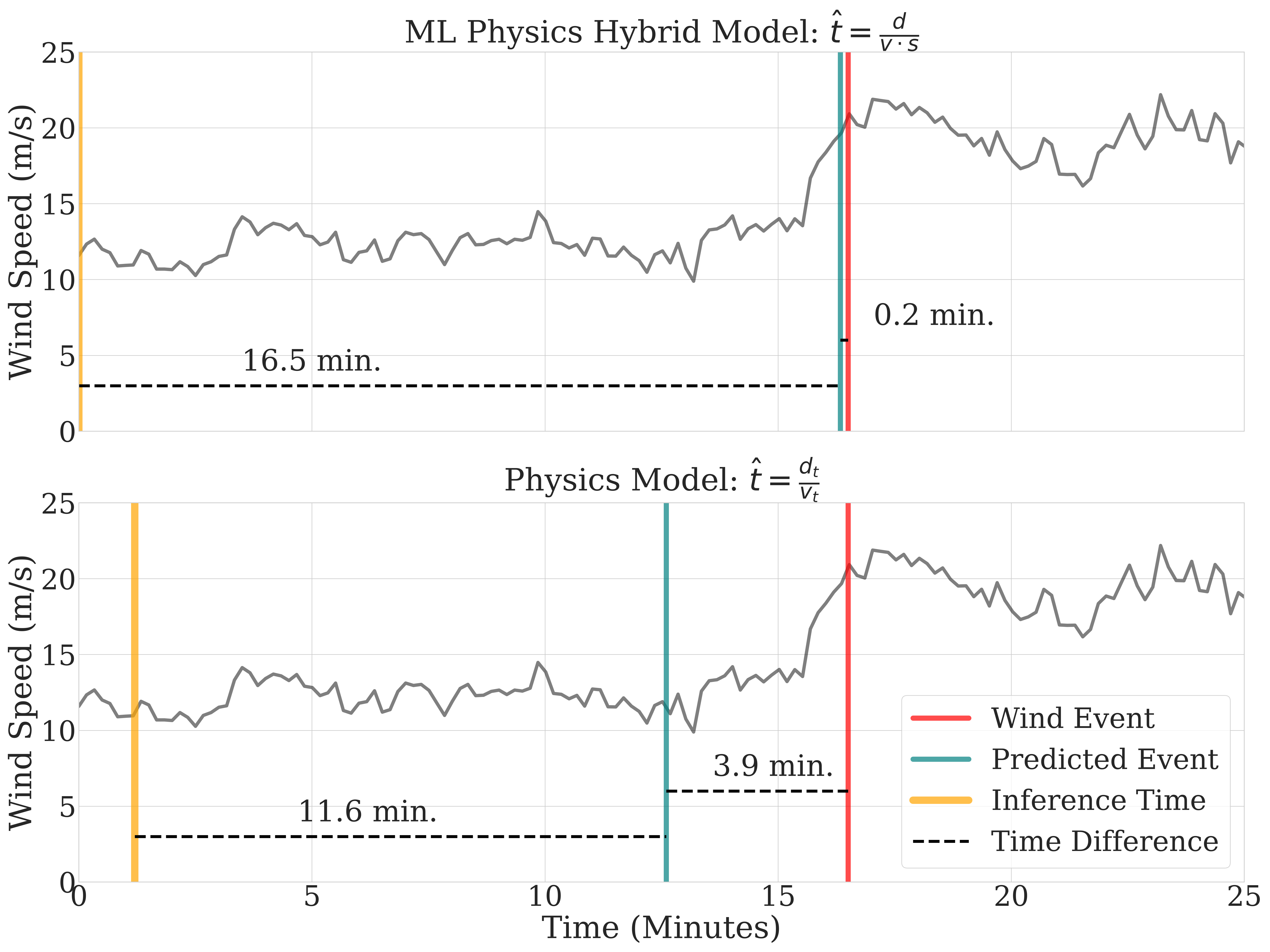
Severe Wind Event Prediction with Multivariate Physics-Informed Deep Learning
W. Potosnak, C. Challu, K. G. Olivares, J. K. Miller, A. Dubrawski
Wind turbines combat climate change by generating clean energy, but their long-term effectiveness depends on minimizing maintenance costs due to damage from severe weather events, such as wind gusts. To address this, we propose a physics-informed deep learning model to better predict severe wind events and a multivariate time series extension. Presented at the Twelfth International Conference on Learning Representations (ICLR).
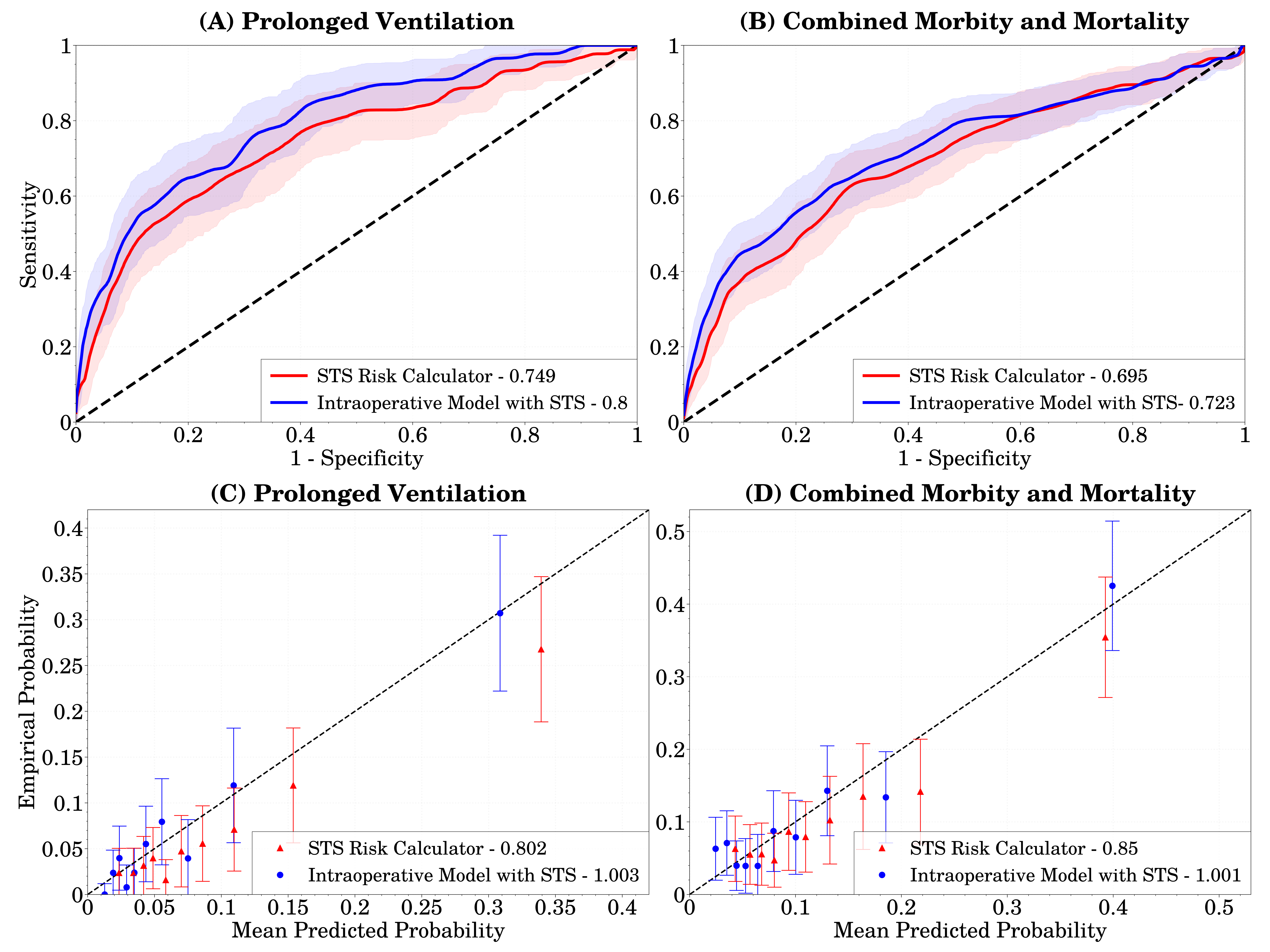
Intraoperative Features Improve Model Risk Predictions Following Coronary Artery Bypass Grafting
W. Potosnak, C. Nagpal, K. A. Dufendach, D. J. Kaczorowski, P. Yoon, J. Bonatti, J. K. Miller, A. Dubrawski
Clinical risk assessment before cardiac surgery guides treatment decisions to reduce postoperative complications. This study aimed to evaluate if machine learning models trained on continuous parameters from intraoperative data can enhance risk prediction compared to the standard STS Risk Calculator for multiple CABG outcomes. Published in the Annals of Thoracic Surgery Short Reports.
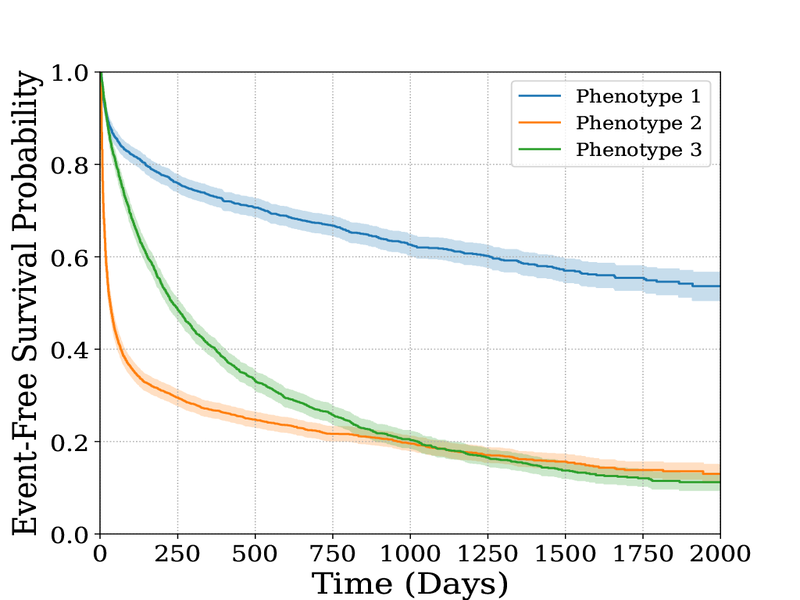
auton-survival: an Open-Source Package for Regression, Counterfactual Estimation, Evaluation and Phenotyping with Censored Time-to-Event Data
C. Nagpal, W. Potosnak, A. Dubrawski
auton-survival is an open-source repository of tools for survival regression, adjustment in the presence of domain shift, counterfactual estimation, phenotyping for risk stratification as well as estimation of treatment effects with censored time-to-event data. In proceedings of the 7th Machine Learning for Healthcare Conference.
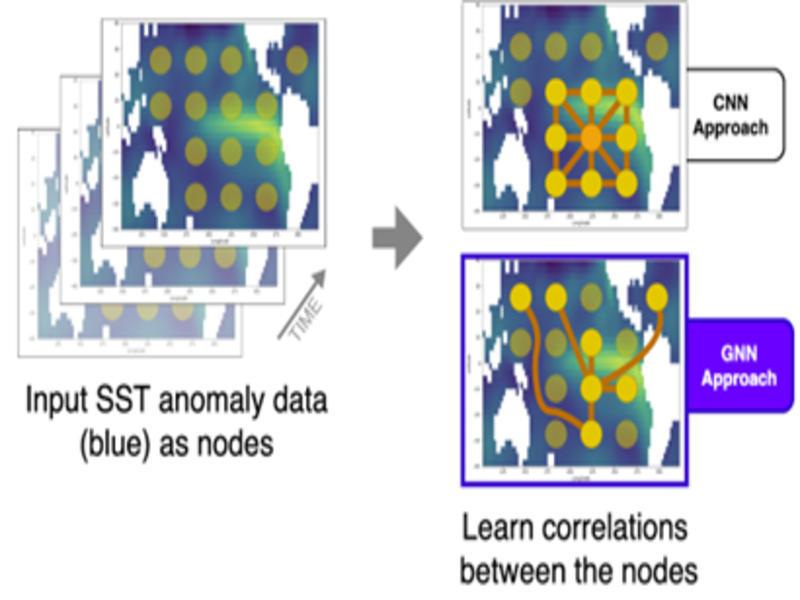
Graph Neural Networks for Improved El Nino Forecasting
S. Rühling Cachay, E. Erickson*, A. F. C., Bucker*, E. Pokropek*, W. Potosnak*, S. Osei, B. Lütjens.
We propose the application of spatiotemporal Graph Neural Networks (GNN) to forecast El Niño–Southern Oscillation (ENSO) at longer lead times with finer granularity and improved predictive skill than current state-of-the-art methods. Presented at the 2020 NeurIPS workshop, Tackling Climate Change with Machine Learning.